Agora, Stephen Morin e seus colegas da Universidade de Harvard, nos Estados Unidos, deram um passo adicional, e deram aos seus robôs uma habilidade muito encontrada nos animais: a capacidade de camuflagem.
Os animais usam duas técnicas para se dar melhor em relação aos seus predadores ou às suas presas: o mimetismo, pelo qual eles tentam imitar ou se parecer com outros animais, e a camuflagem, pela qual os animais tentam se confundir com o ambiente para não serem vistos.
O robô macio e flexível tem a capacidade de mudar sua própria cor para se destacar menos da cor do ambiente - um tipo de camuflagem conhecido como homocromia.
Segundo os pesquisadores, robôs com essa habilidade poderão ser úteis para o estudo do comportamento de animais em ambiente natural, além de "outras atividades nas quais se supõe que as máquinas não sejam notadas".
Camaleão ou vagalume
O robô é feito de silicone, com o material sendo permeado por duas redes separadas de minúsculos canais, fabricadas por um processo de impressão 3D.
A primeira rede de microcanais é usada para a movimentação do robô, o que é feito injetando ar comprimido, de forma seletiva, em cada uma das quatro pernas do robô.
A segunda rede de microcanais permite a injeção dos corantes, responsáveis pela mudança de cor do robô.
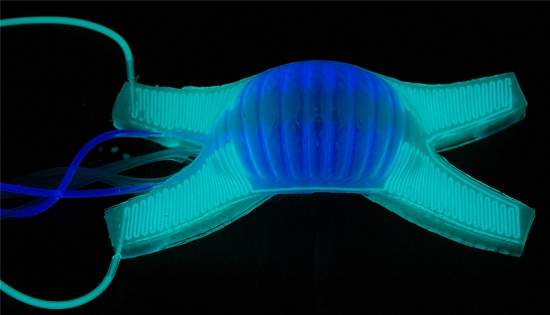
Como é possível controlar a temperatura dos corantes, o robô também pode mudar sua cor no espectro infravermelho - além de câmeras de vigilância, algumas cobras têm órgãos especiais capazes de detectar essa frequência.
Além de mudar de cor para se camuflar, o robô também pode anunciar sua presença, piscando como um vagalume, o que é feito mudando rapidamente os corantes, ou usando corantes fluorescentes.
O grande inconveniente desse primeiro protótipo é que todo o aparato de controle fica fora do robô - ou seja, esse robô com habilidades de polvo e camaleão não é autônomo.
Nenhum comentário:
Postar um comentário