Contudo, por trás de cada aparelho, do forno de microondas ao piloto automático de um avião, existem programas de computador dizendo aos aparelhos o que eles devem fazer em cada situação.
"Tudo o que é automatizado requer um processo de controle e para isso é necessário um grande suporte da matemática," explica Tiago Roux de Oliveira, autor de um estudo realizado na Coppe/UFRJ - atualmente ele é professor da UERJ.
O que Tiago fez foi criar um novo algoritmo que permite a elaboração de processos de controle mais simples, mais eficazes e com uma resistência muito maior a falhas e variações imprevistas no processo.
Em tese, o projeto de um controlador eletrônico para automatizar um sistema envolve a descrição matemática de todas as variáveis relevantes, o processamento de todas as suas inter-relações, e a geração da saída corresponde.
Mas tudo começa a se complicar quando se depara, no mundo real, com situações que não são lineares - há muitos sistemas que são não-lineares, e há ainda alguns conhecidos como fortemente não-lineares. Além de um número maior de entradas, para se assegurar de que todos os fatores estão sendo levados em conta, o processamento interno é muito mais complexo.
Pode ocorrer, por exemplo, que a relação de entrada e saída do sistema esteja adequada, mas seus estados internos podem estar atingindo valores não previstos, ocasionando risco de danos ao sistema - pense no controle de um avião, navio, ou mesmo do piloto automático de um carro, e pode-se imaginar quais são esses riscos.
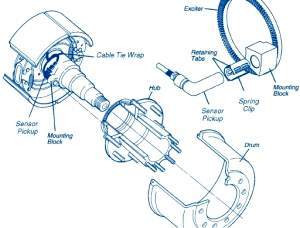
Controle do freio ABS
O trabalho de Tiago - aquele tipo de teoria com potencial de impacto imediato na prática - consistiu na criação de algoritmos de controle com uma quantidade reduzida de informações, medindo apenas algumas variáveis do sistema. Essa simplificação torna o programa de controle muito mais resistente a falhas.
"Meu objetivo inicial era trabalhar com classes mais gerais de sistemas não-lineares. Mas, à medida que trabalhávamos, fomos descobrindo aplicações para a teoria, o que foi a parte mais gratificante do trabalho," conta ele.
O primeiro experimento, ainda em nível de simulação numérica, teve como resultado uma nova proposta de controlador para os freios ABS (Antilock Braking System), o sistema que impede o travamento das rodas durante a frenagem de um carro.
Enquanto os freios comuns tentam zerar instantaneamente a velocidade angular das rodas, os freios ABS utilizam uma variável que corresponde à maior força de atrito, o que resulta em uma parada mais suave em um espaço menor, sem que a roda trave.
"Em nosso experimento na Coppe, conseguimos alcançar o ponto máximo da frenagem sem conhecer a velocidade angular ou o coeficiente de deslizamento da pista, apenas conhecendo a velocidade linear do carro," conta Tiago.
Robôs autônomos
A estratégia proposta pode também ser aplicada a outros problemas de otimização.
Por exemplo, em um tipo de sistema de navegação chamado servovisão, pelo qual o controle dos movimentos de um robô é feito através das imagens captadas por sua câmera, e não pela informação medida nos motores das suas juntas.
Hoje, a tecnologia permite a servovisão com uma câmera alinhada com o robô. Na proposta de Tiago, tornou-se possível controlar o robô com a câmera em qualquer ângulo.
É uma excelente saída para ambientes inóspitos, como o fundo do mar, e espaços com radioatividade, quando pode ser impraticável fazer ajustes na câmera.
A teoria está pronta. Agora só falta o interesse da indústria.
"Precisamos de apoio para tirar essas ideias do papel. Sobre o freio ABS, conseguimos chegar a um esquema que se mostrou mais eficiente do que o tradicional e seria muito bom testar a aplicação desse algoritmo em nossos carros. Ideias nós temos, sabemos fazer. Só faltam o interesse das empresas e os incentivos," diz Tiago.
Fonte: Planeta Coppe
Nenhum comentário:
Postar um comentário