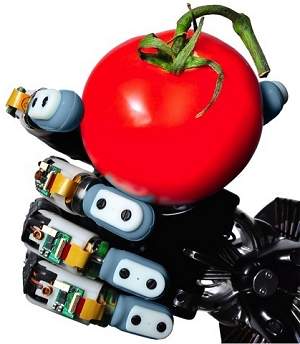
Assim é o protótipo construído por engenheiros da Universidade do Sul da Califórnia, nos Estados Unidos.
O sucesso deve-se a um dedo robótico projetado inteiramente pensando na capacidade de "sentir" os objetos tocados. E em um software capaz de processar essas "sensações".
São três tipos de sensores incorporados no dedo como um todo, o que permitiu fugir do padrão tradicional de detecção, geralmente baseado em sensores do tipo liga-desliga.
Sensores sem fios
Tudo começa na pele artificial do dedo robótico, uma membrana flexível dotada de rugosidades similares às digitais humanas, aumentando muito sua capacidade de detecção de vibrações.
Como a pele robótica reveste uma camada líquida, ela vibra de forma muito precisa para cada superfície tocada. Um hidrofone, instalado dentro da estrutura que faz as vezes do osso, capta essas vibrações.
O dedo humano também usa as vibrações para identificar texturas - mas o dedo robótico é mais sensível.
Juntamente com isso, um termistor que se espalha ao longo de todo o dedo permite a detecção de temperaturas, também com uma precisão extremamente elevada, em toda a extensão do dedo, e não apenas em um ponto específico.
Finalmente, sensores de impedância, também ao longo de todo o dedo, permitem capturar a força exercida, fornecendo ao programa de controle um feedback que permite controlar as diferentes pressões necessárias para pegar uma bola de bilhar ou um ovo, por exemplo.
E essa mão robótica tem sua própria elegância, ainda que interna: todo o hardware dos dedos individuais é estruturado sem a necessidade de complexas fiações, simplificando o projeto e tornando-o mais robusto.
Exploração bayesiana
Mas nenhuma elegância de hardware é capaz de controlar uma mão robótica a ponto de ela pretender imitar uma mão humana - o objetivo dos pesquisadores é criar próteses robotizadas que sejam difíceis de diferenciar de uma mão biológica.
Para isso, Gerald Loeb e Jeremy Fishel, autores do projeto, criaram um algoritmo capaz de tomar decisões sobre como explorar o mundo externo, aproveitando todas as informações de vibração, força e temperatura.
Quando os seres humanos tentamos identificar um objeto pelo tato, nós utilizamos uma ampla gama de movimentos exploratórios, com base em nossa experiência anterior com objetos semelhantes.
Um famoso teorema, criado pelo matemático Thomas Bayes no século 18, descreve como as decisões são tomadas a partir de informações obtidas durante esses movimentos exploratórios.
Até agora, contudo, ninguém havia descoberto uma maneira de, dado um movimento inicial, decidir qual movimento exploratório deve ser feito a seguir.
Loeb e Fishel descobriram, elaborando um novo teorema para resolver este problema de forma geral - o que eles chamaram de "exploração bayesiana".
Tato robótico
A mão robótica inovadora, controlada pelo algoritmo inovador, conseguiu identificar 117 materiais diferentes, de tecidos e papel a frutas e produtos em lata.
Quando confrontado com um material aleatório, o robô consegue identificá-lo com 95% de precisão, após realizar uma média de cinco movimentos exploratórios.
Ou seja, o robô identifica os objetos apalpando-os.
Ele só fica confuso por pares de texturas muito similares - do tipo que nem mesmo os pesquisadores conseguiam identificar com suas próprias mãos biológicas.
Nenhum comentário:
Postar um comentário