 Pesquisadores brasileiros desenvolveram um sistema híbrido para membros superiores (braço, antebraço e mãos) que auxilia as atividades motoras de pessoas tetraplégicas.
Pesquisadores brasileiros desenvolveram um sistema híbrido para membros superiores (braço, antebraço e mãos) que auxilia as atividades motoras de pessoas tetraplégicas.O equipamento permite que o paciente alcance objetos distantes do corpo por comandos de voz. O trabalho foi feito na Escola de Engenharia de São Carlos, da USP.
Exoesqueleto
Renato Varoto, responsável pela pesquisa, explica que o diferencial deste sistema foi a combinação de técnicas utilizadas.
"A técnica mecânica, que inclui a órtese e que possibilita movimentos de flexão e extensão do cotovelo; e uma técnica não convencional, que é a estimulação elétrica neuromuscular, que possibilita os movimentos da mão," diz Varoto.
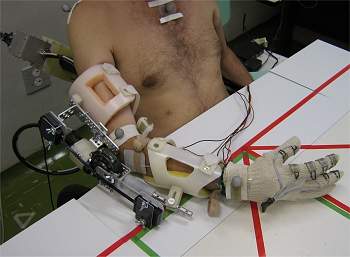
O protótipo é constituído de uma órtese dinâmica para cotovelo, que funciona como um exoesqueleto, eletrodos de superfície que vão nas mãos e uma luva que contém sensores para indicar ao paciente a força aplicada.
Comando de voz
Todas as partes mecânicas e eletrônicas do equipamento são comandadas por voz.
"Com o comando de voz, cinco palavras são gravadas de acordo com o gosto do paciente: uma para estender o braço, uma para a flexão do cotovelo, uma para parar o movimento, uma para pegar o objeto e uma para soltar o objeto. Se for preciso, é possível controlar o nível de estimulação para o movimento da mão e a velocidade da órtese do cotovelo, cada uma com duas palavras", descreve Varoto.
Segundo o pesquisador, o sistema é indicado para tetraplégicos que possuem movimentos somente do pescoço e do ombro. Desse modo, o comando de voz é essencial para que os tetraplégicos realizem os movimentos voluntariamente.
Braço robótico para tetraplégicos
O braço robótico criado por Varoto foi testado em 15 pacientes do Hospital das Clínicas da Universidade Estadual de Campinas (Unicamp), em março e abril deste ano.
O pesquisador ressalta que "o que chama a atenção é o auxílio que o sistema pode trazer aos tetraplégicos".
Nos testes clínicos, os pacientes conseguiram exercer de forma autônoma atividades como beber água e se alimentar. "São atividades simples para nós, mas para os pacientes, que perderam quase todos os movimentos do corpo, traz uma grande satisfação a esperança de poder fazê-las", diz Varoto.
Fisioterapia com robô
O pesquisador pretende continuar as aplicações com os pacientes. O próximo passo será aplicar uma terapia assistida por robô. Nessa terapia, o paciente faz uma série de movimentos repetitivos com o sistema, com a diferença de que, em vez de ser um fisioterapeuta que o auxilia nas atividades, é um robô que exerce essa função.
O objetivo da terapia é tentar fazer o tetraplégico ganhar movimentos naturais com um método artificial.
Varoto explica como isso pode acontecer pelo conceito de neuroplasticidade: "Quando um paciente apresenta paralisia e começa a fazer movimentos repetitivos com a ajuda de aparelhos, ele pode reaprender, ainda que não totalmente, alguns movimentos. O que pode acontecer em termos biológicos é que há um rearranjo dos neurônios no sistema nervoso central."
O pesquisador ressalva que ainda há alguns aspectos do sistema que precisam ser aperfeiçoados: "O sistema pode ser mais leve e pode melhorar esteticamente. Quanto mais atender as expectativas do paciente melhor".
Nenhum comentário:
Postar um comentário